Overview
- We have built a simulation environment for testing algorithm implementations on quadcopter in Gazebo.
- Incorporated tele-operation and semi-autonomous functionality using altimeter, IMU, and camera.
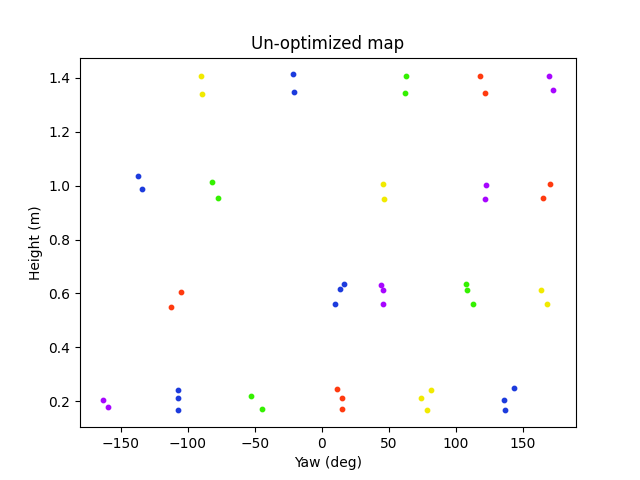
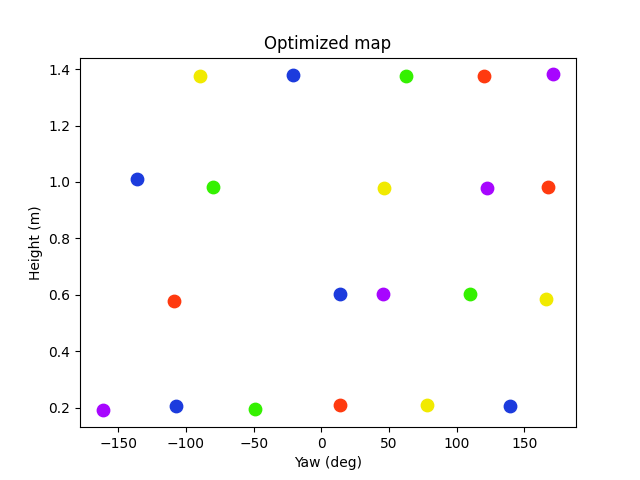
- Optimized Z-direction mapping using DBSCAN algorithm.
More information regarding the development process is documented in the website.
Few Snapshots of the Work Done
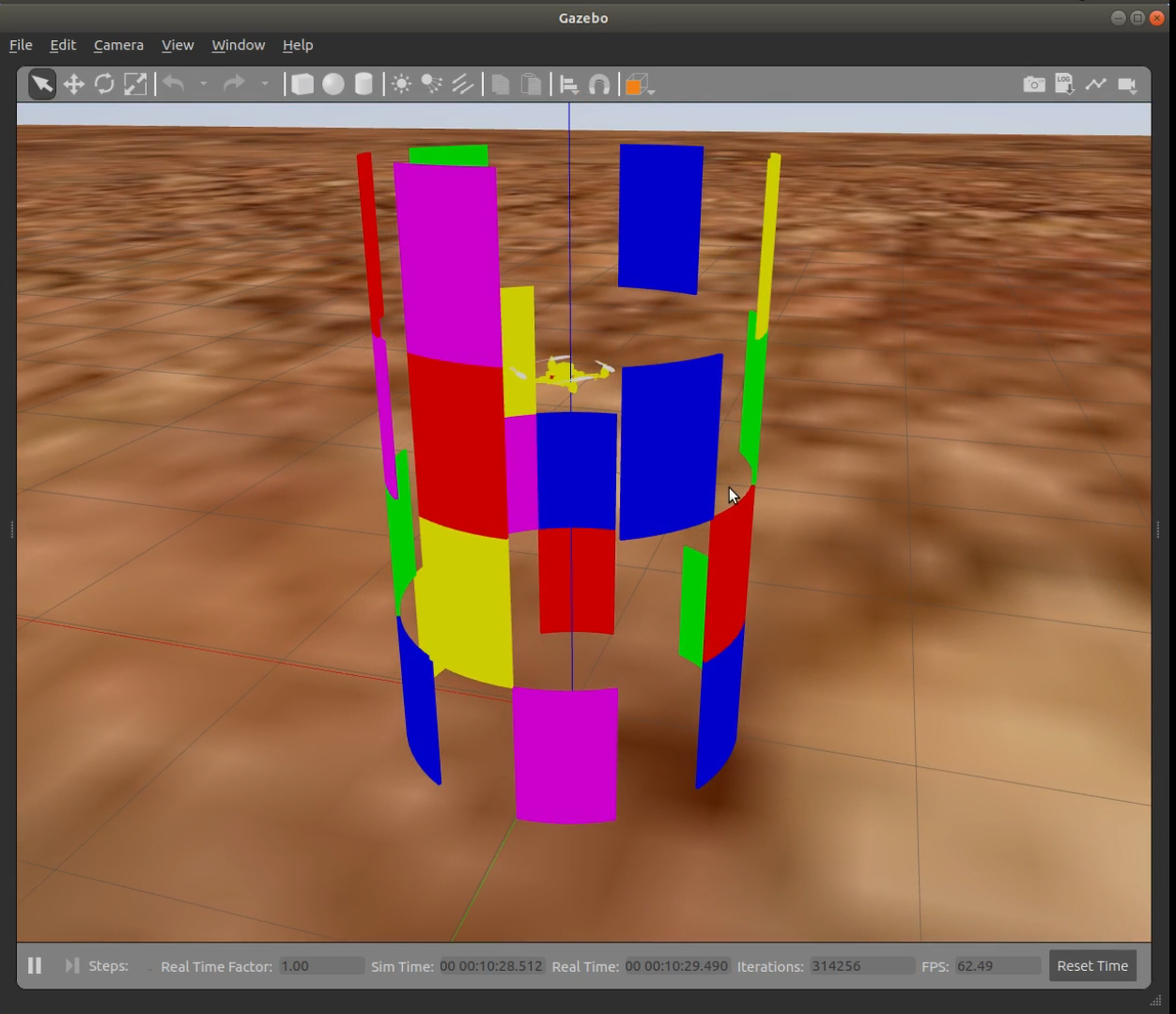
Quadcopter hovering in the Gazebo world simulation environment over the ROS framework

Quadcopter simulated in the Gazebo environment
A simpler optimization algorithm is implemented to optimize the graph obtained: DBSCAN